Innowacje opracowane na potrzeby budowanych modeli -
informacje oraz galerie zdjęć
Aparatura RC (2010 r.)




Kompletne oświetlenie i dźwiękowy sygnał cofania (2010 r.)
W ramach projektu studenci zmodyfikowali aparaturę zdalnego sterowania, zamieniając 2 kanały proporcjonalne na 16 kanałów włącz/wyłącz. Dzięki temu pojazd, tak jak jego duży odpowiednik, wyposażony został w kompletny zestaw świateł, którymi można sterować za pomocą aparatury RC oraz manipulatora.
Do stworzenia tej innowacji przyczynili się:
- Pan Piotr C.,
- Pan Bogumił G.,
- Pan Jacek J.,
- Pan Marek S.,
- Pan Łukasz Ś.,
- Pan Przemysław F.,
- pracami zespołu kierował dr inż. Piotr Mróz.




Manipulator do sterowania ręcznego z wyświetlaczem
Manipulator został wykonany na bazie komputerowego joysticka. Umożliwia on sterowanie wszystkimi funkcjami pojazdu. Wyświetlacz wbudowany w obudowę manipulatora informuje kierującego pojazdem o aktualnie włączonych funkcjach.
Jak widać na zdjęciu, znajdują się na nim obrotomierz, szybkościomierz oraz kontrolki wszystkich świateł, wybranego biegu, dołączenia naczepy, efektów dźwiękowych i połączenia z komputerem.
Do stworzenia tej innowacji przyczynili się:
- dr inż. Piotr Mróz,
- mgr inż. Mariusz Życiak,
- Pan Paweł Z. (student kierunku Telekomunikacja).





Pomiar prędkości obrotowej silnika i szybkości samochodu
W skrzyni biegów zamontowany został czujnik prędkości obrotowej jednego z kół zębatych. Na podstawie znajomości poszczególnych przełożeń i obwodu koła wyliczana jest prędkość obrotowa silnika i szybkość pojazdu. W ramach pracy sprawdzono słuszność przyjętych koncepcji i rozwiązań sprzętowych. Zebrane informacje będą przesyłane w czasie rzeczywistym do manipulatora i prezentowane na jego wyświetlaczu. W tym celu zostanie stworzona nowa, dwukierunkowa aparatura zdalnego sterowania.
Do stworzenia tej innowacji przyczynili się:
- Pan Maciej Śliwa,
- pracami zespołu kierował dr inż. Piotr Mróz.


Program sterujący samochodem
Pan Paweł Ż. w ramach pracy dyplomowej (promotor: dr inż. Piotr Mróz) opracował program do sterowania modelem ciężarówki. Jak widać na zdjęciu w dolnej części okna programu znajduje się widok deski rozdzielczej samochodu wraz z elementami sterującymi, a w górnej okno przeglądarki internetowej, w której wyświetlany jest obraz z kamery umieszczonej wewnątrz pojazdu. Za pomocą myszki komputerowej możliwe jest sterowanie wszystkimi funkcjami samochodu takimi jak jazda w przód i w tył, skręcanie, sterowanie światłami, zmiana biegów oraz sterowanie podporami znajdującymi się w naczepie.

Układ sterujący do naczepy
Pan Tomasz H. w ramach pracy dyplomowej (promotor: dr inż. Piotr Mróz) opracował dwukierunkowy układ bezprzewodowego sterowania naczepą. Dzięki zastosowaniu transmisji dwukierunkowej możliwe jest oprócz możliwości sterowania naczepą, również otrzymywanie potwierdzenia wykonania poszczególnych rozkazów oraz przesyłanie innych informacji jak na przykład napięcie akumulatora zasilającego naczepę. Dzięki wykorzystaniu interfejsu ZigBee możliwe jest sterowanie naczepą zarówno z urządzenia nadawczego jak i bezpośrednio z komputera.


Czujnik kąta skręcenia naczepy
Pan Adrian S. opracował i wykonał układ czujnika pola magnetycznego. Po umieszczeniu magnesu stałego pod siodłem naczepy, możliwe będzie określenie kąta skrętu naczepy względem ciągnika siodłowego. Na podstawie wartości tego kąta możliwe będzie sterowanie skręcaniem kołami ostatniej osi naczepy.
Do stworzenia tej innowacji przyczynił się:
- Pan Adrian Sabuk,
- pracami kierował dr inż. Piotr Mróz.




Odtwarzacz dźwięków
Do stworzenia tej innowacji przyczynił się:
- Pan Kamil S. (student kierunku Telekomunikacja),
- promotorem był dr inż. Krzysztof Urbański.


Kamera
Do stworzenia tej innowacji przyczynił się:
- Pan Karol D. (student kierunku Telekomunikacja),
- promotorem był dr inż. Krzysztof Urbański.
Niestety podczas eksploatacji obraz był niestabilny, dlatego zdecydowano o konieczności opracowania innego układu pozyskania i przesyłu obrazu z kamery. 
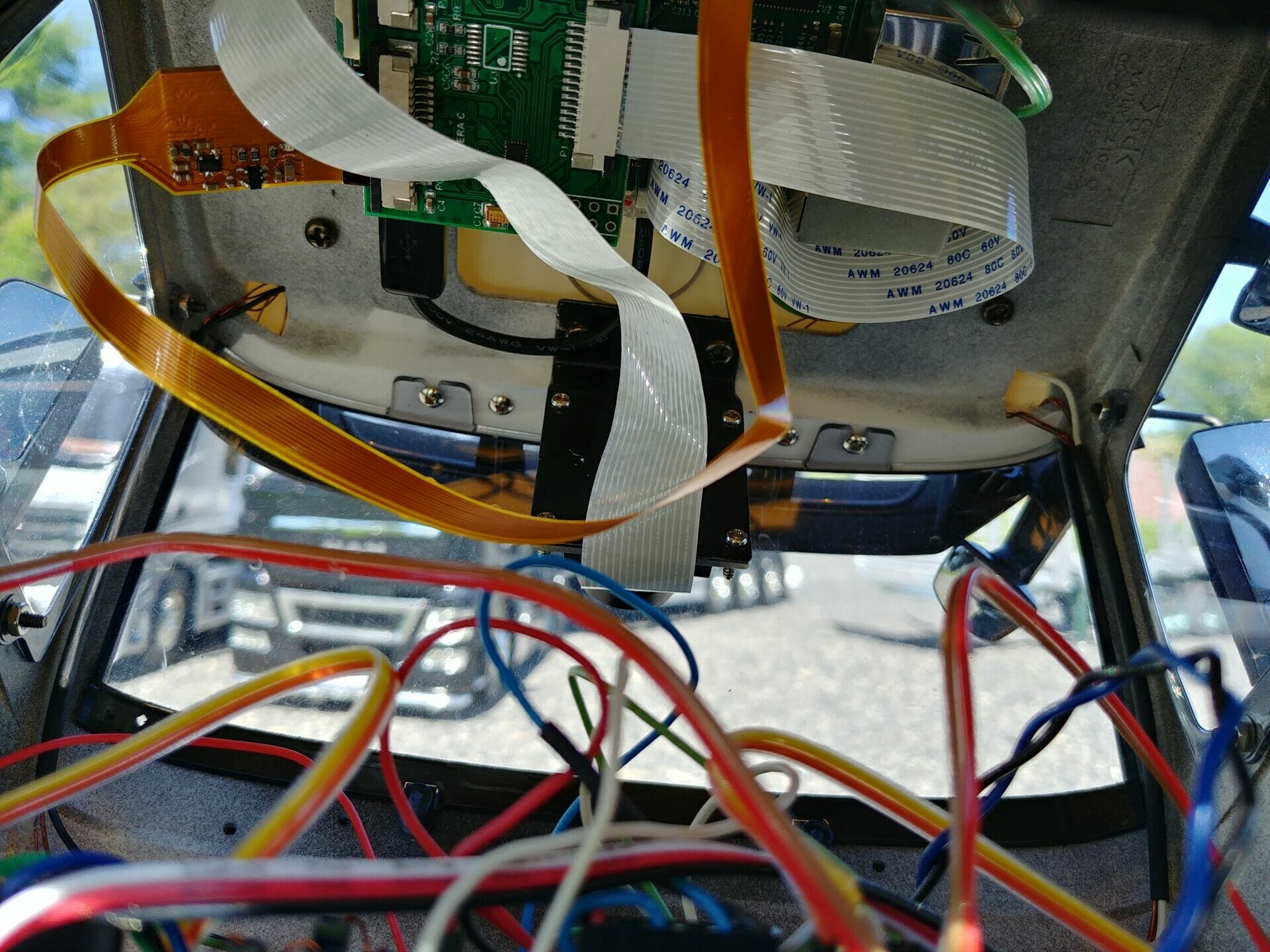
Kamery HD
Do pozyskania i przesyłania obrazu wykorzystano komputer Raspberry Pi 3 z przełącznikiem kamer i dwoma kamerami 5MPx. Jedna szerokokątna umieszczona jest z przodu kabiny a druga zwykła - z tyłu. Obraz z wybranej kamery przesyłany jest za pośrednictwem interfejsu WiFi. Komputer ten będzie również wykorzystywany podczas autonomicznego sterowania pojazdem.

Dekoder MP3
Do stworzenia tej innowacji przyczynił się:
- Pan mgr inż. Dawid Ś.,
- promotorem był dr inż. Piotr Mróz.
Niestety podczas eksploatacji okazało się, że skoki napięcia wywołane dużą zmianą obciążenia silnika napędowego powodowały resetowanie układu i przerywanie odtwarzania dźwięków. 
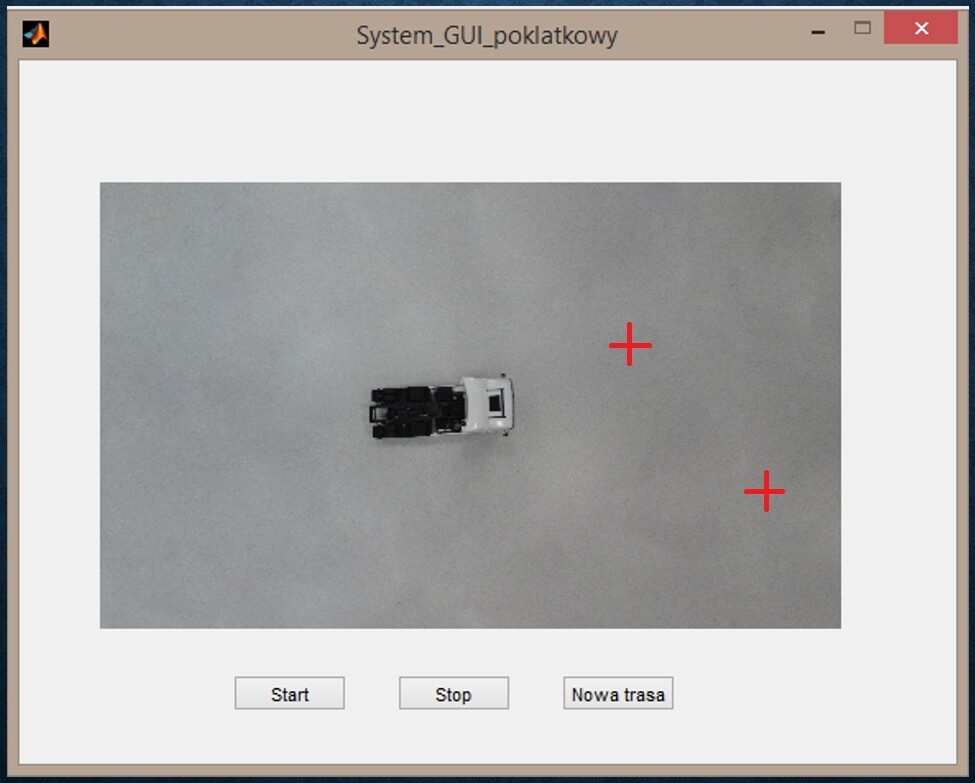
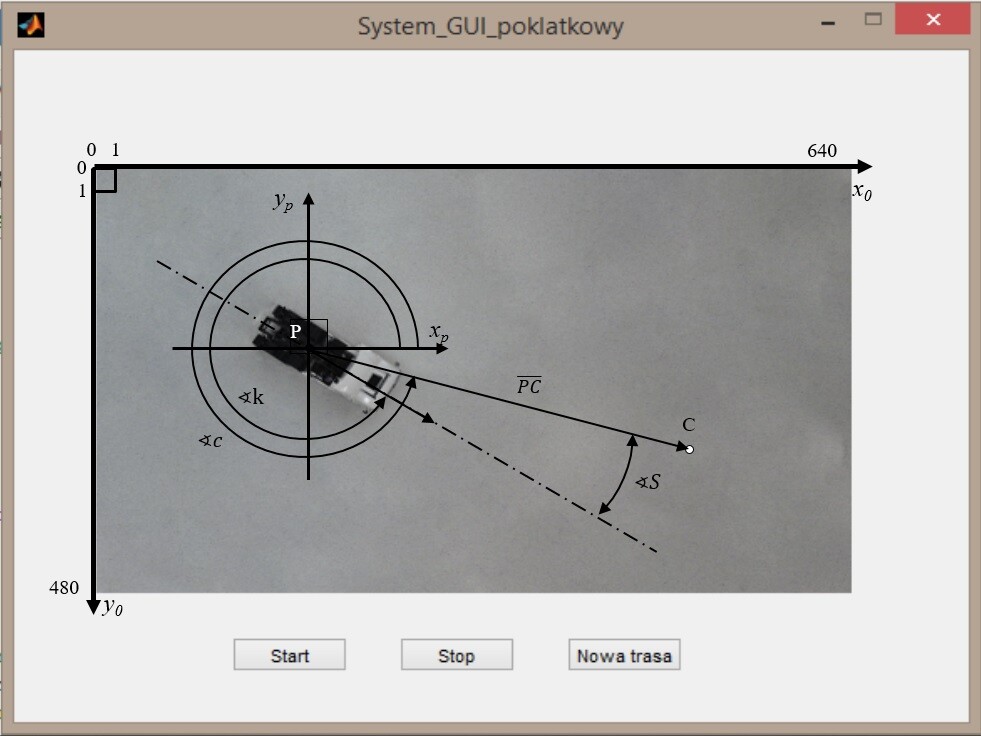
Sterowanie ciężarówką na podstawie obrazu z kamery stacjonarnej (2017 r.)
Do stworzenia tej innowacji przyczynił się Pan Dariusz Rutkowski. Wyniki jego prac zostały opublikowane w artykule "The Vehicle Control System Based on Images From an External Camera" na międzynarodowej konferencji naukowej PESW 2017 w Roztoky koło Pragi.

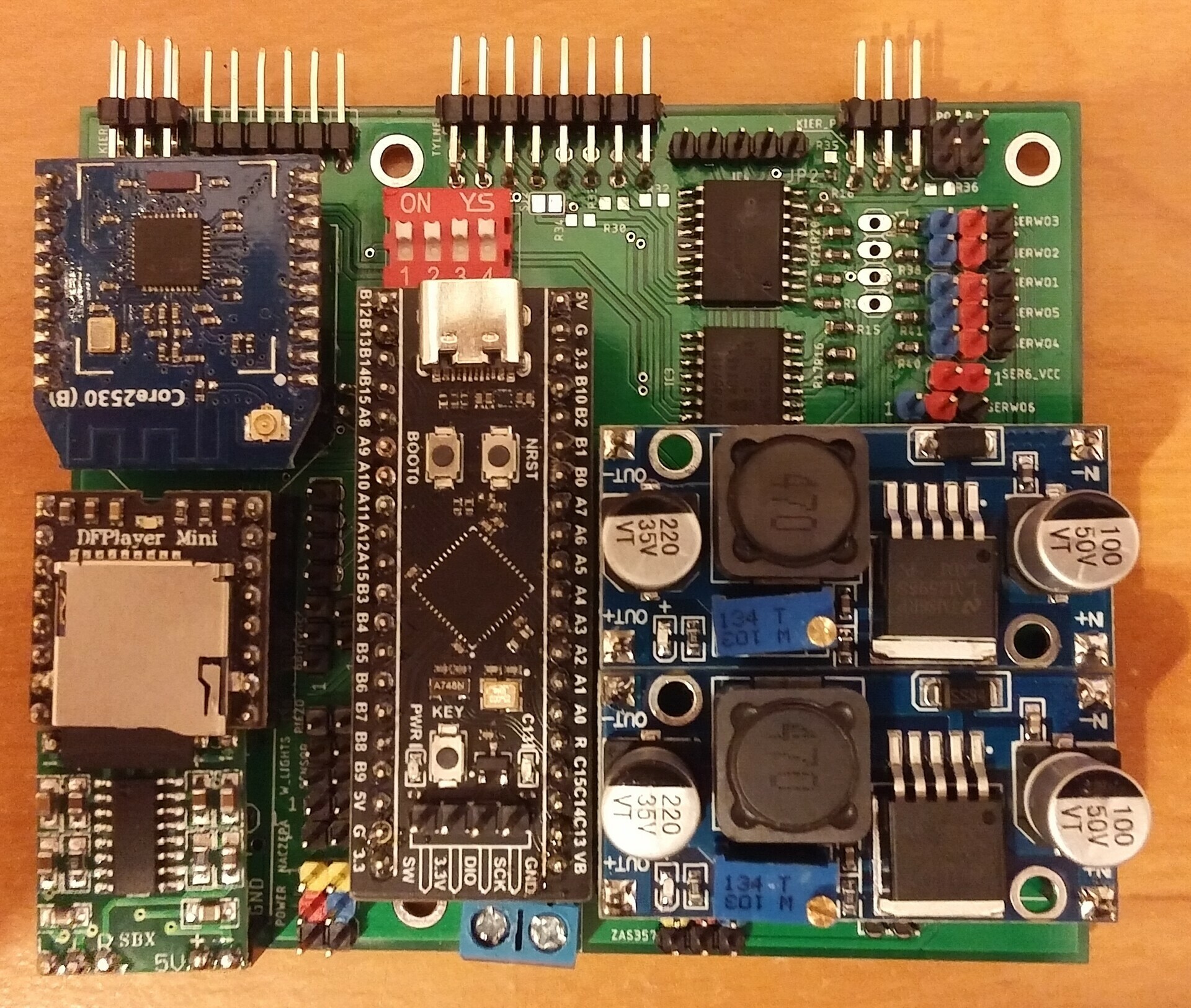
Nowy sterownik ciężarówki (2020 r.)
Sterownik opracował Pan Damian Kulikowski w ramach pracy dyplomowej: Opracowanie układu wykonawczego do bezprzewodowego sterowania modelem ciężarówki (2020 r.). Opracowany układ jest bardziej rozbudowana wersją poprzedniego. Oprócz sterowania obecnie dostępnymi modelami ciągników siodłowych znajdującymi się w Instytucie Metrologii, Elektroniki i Informatyki umożliwia on sterowanie wywrotką i pomocą drogową.

Nowy sterownik naczepy (2020 r.)
Sterownik opracował Pan Michał Kałtur w ramach pracy dyplomowej: Układ sterowania bezprzewodowego modelem naczepy (2020 r.). Opracowany układ jest bardziej rozbudowana wersją poprzedniego. Oprócz sterowania obecnie dostępnymi modelami naczep znajdującymi się w Instytucie Metrologii, Elektroniki i Informatyki umożliwia on sterowanie wywrotką i naczepą niskopodłogową. Jego konstrukcja umożliwi również wymianę w starych naczepach sterownika na nowy.


Nowy sterownik naczepy (2020 r.)
Układ generujący dźwięki pracy agregatu chłodzącego oraz imitujący oświetlenie agregatu.